Connect
link
http://connectandreasmuxel.com
downloads
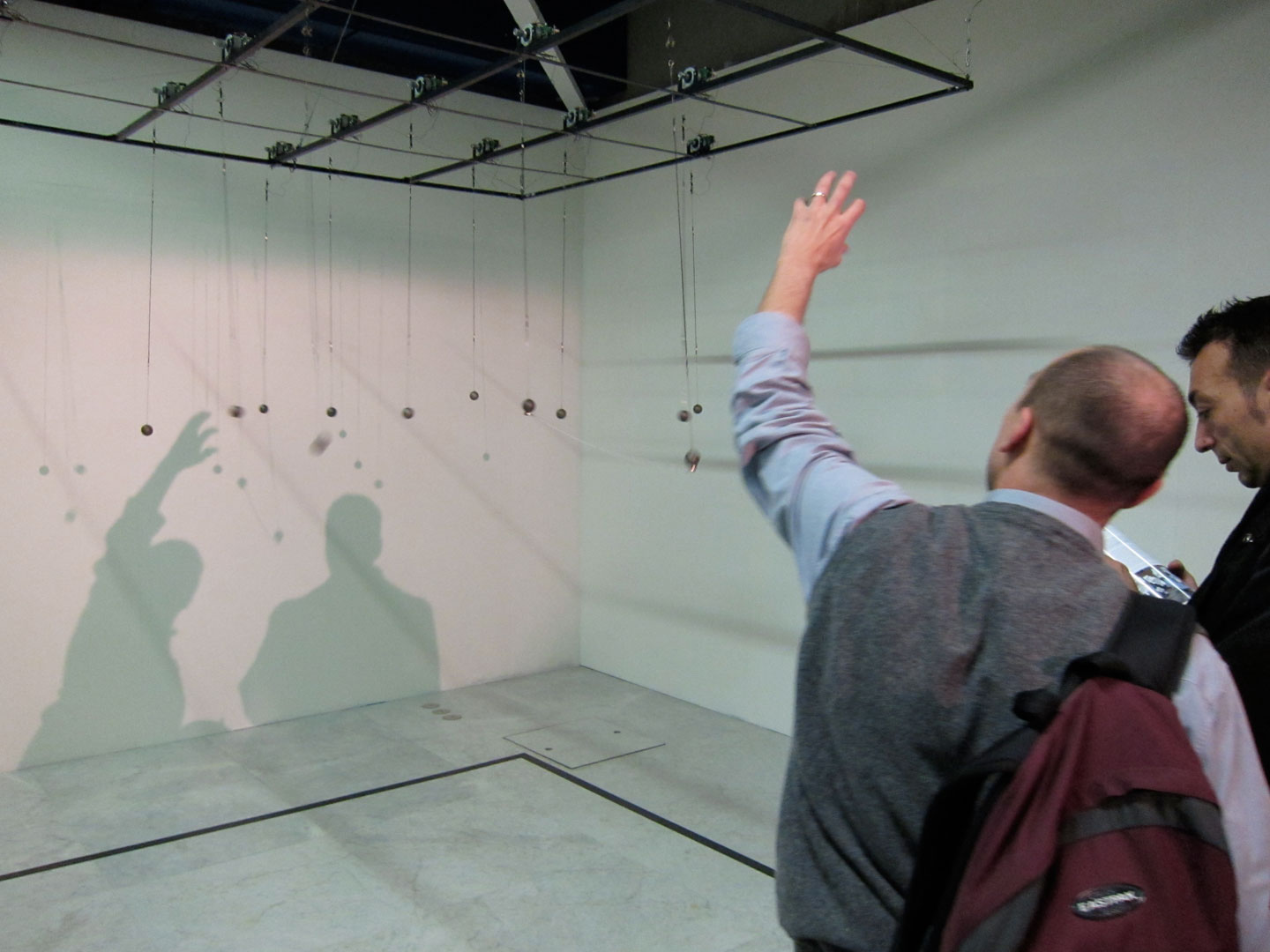
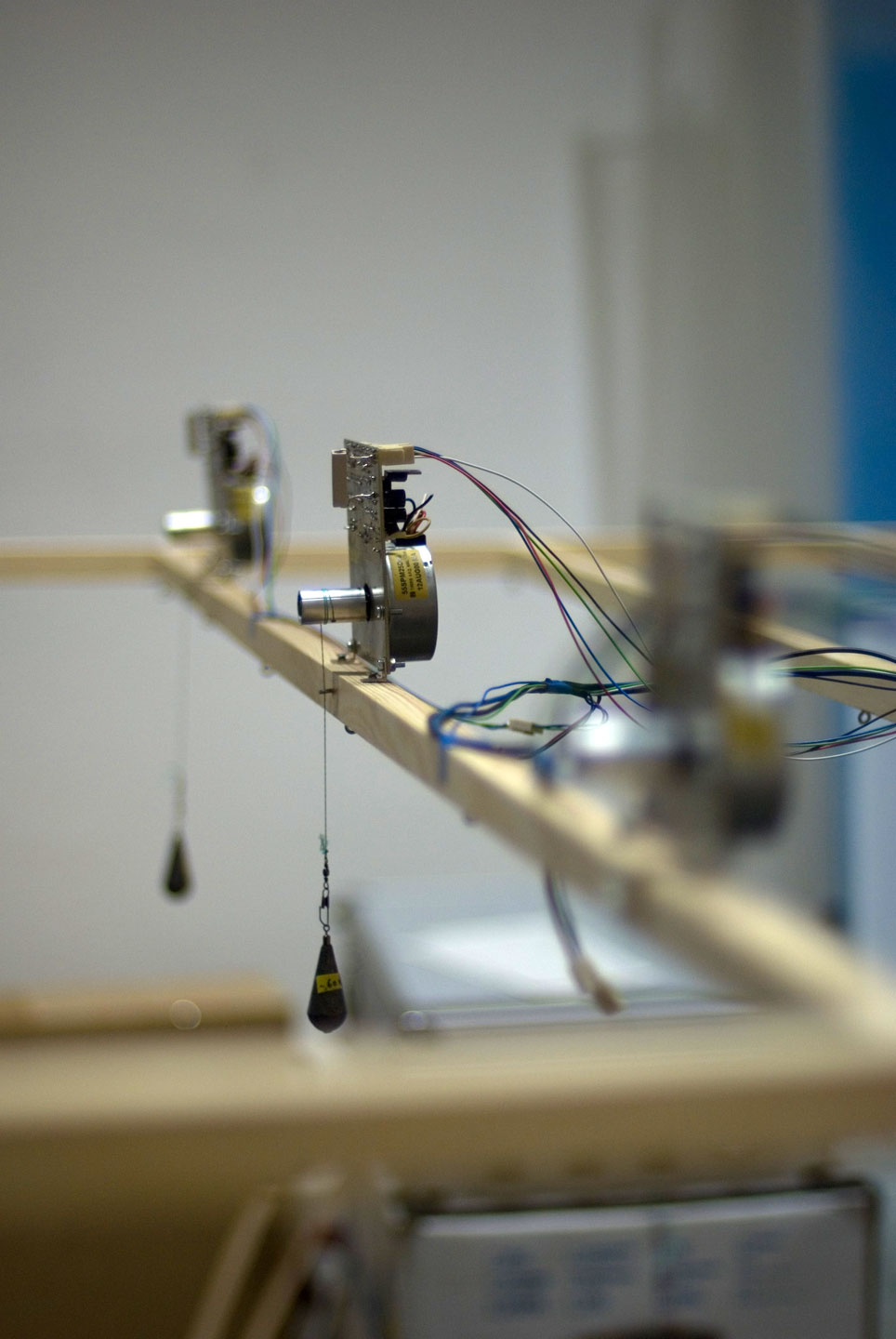
In each of thirteen units, a steel ball is suspended from a rubber string which is driven yo-yo like for a short period, by a motor it is suspended from. The only other component of the work is a short carbon rod with a magnet at each end. At the outset it is attached to one ball. Its presence causes the ball to which it is attached to become excited, which in turn causes the loose end of the rod to swing around. The structure built by the ball-string and magnet-rod pair behaves as a “double pendulum” – an iconic chaotic movement generator. Eventually, the loose magnet finds a second ball and a new connection is built. This assemblage swings around, until one magnet breaks away continuing the aimless wandering of the carbon rod across the matrix. There is no main controller outside of the sculpture and no digital connection between the units. The program logic of each element’s microcontroller is based on identical rules, but the always rebuilt structure of the sculpture becomes its own analog algorithm for non-linear behavior. The system produces complex behavior, although its structure and rules are very simple.
hardware/software
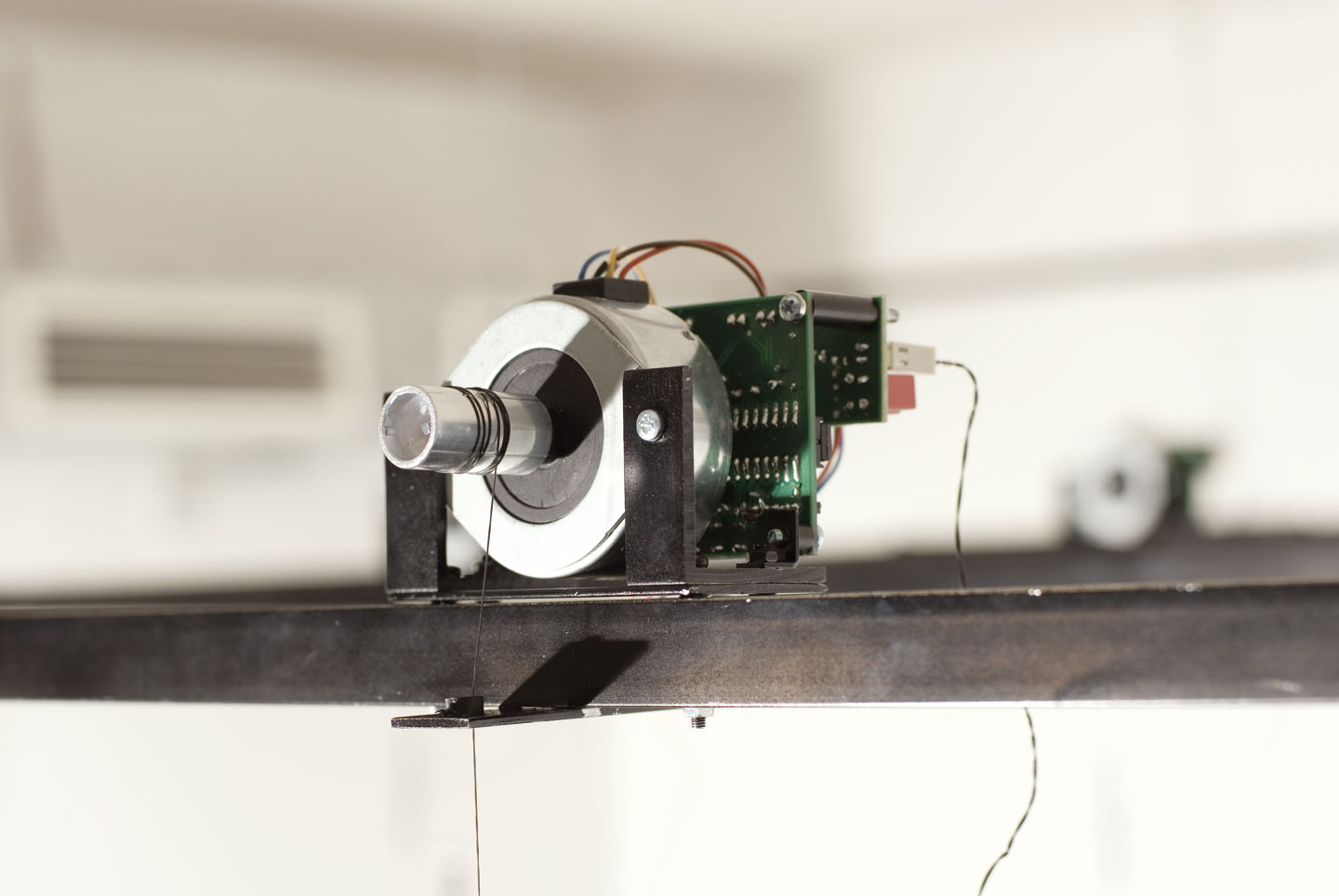
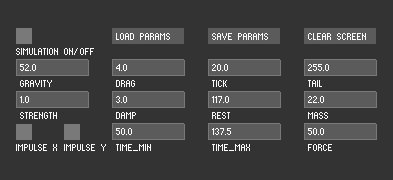
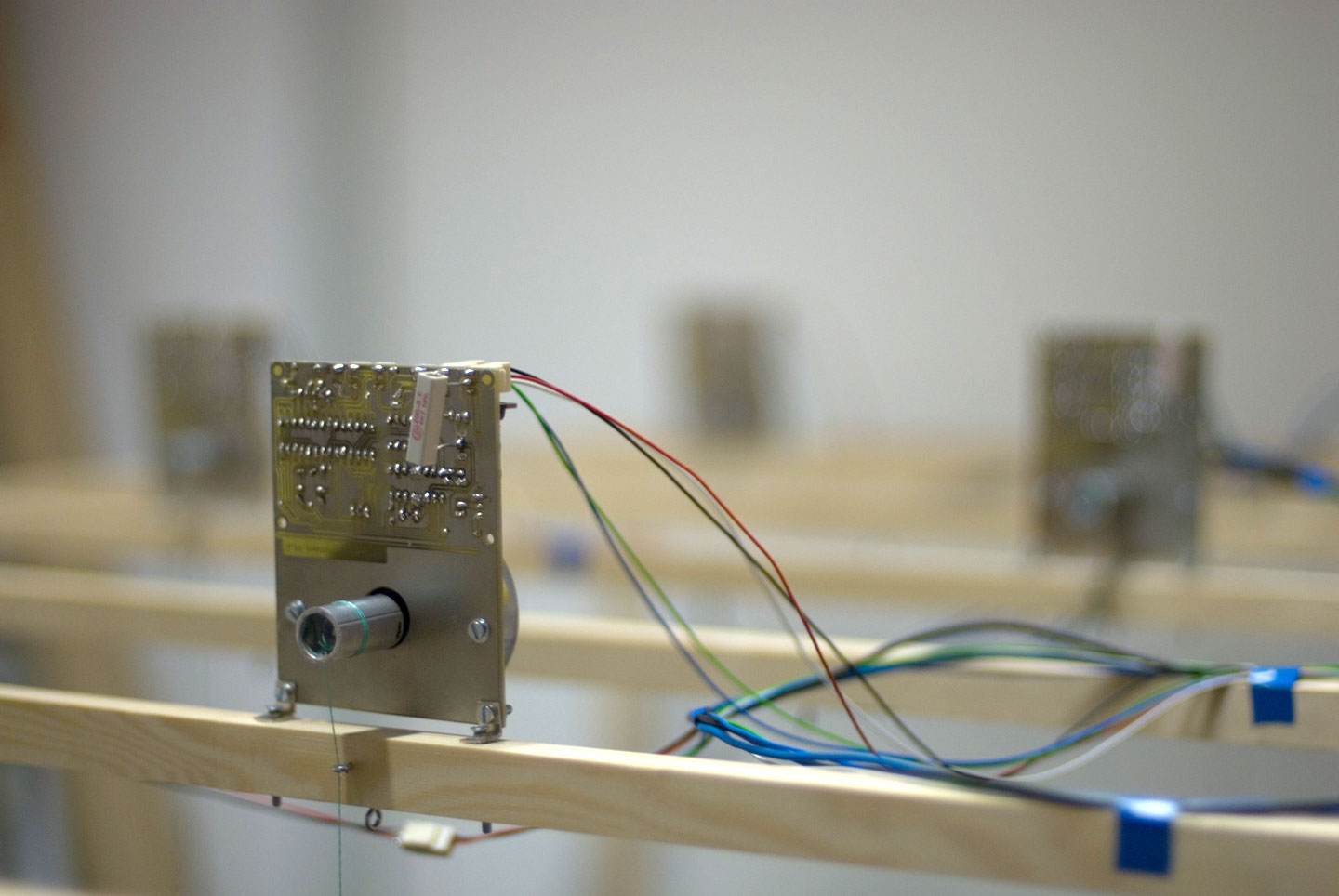
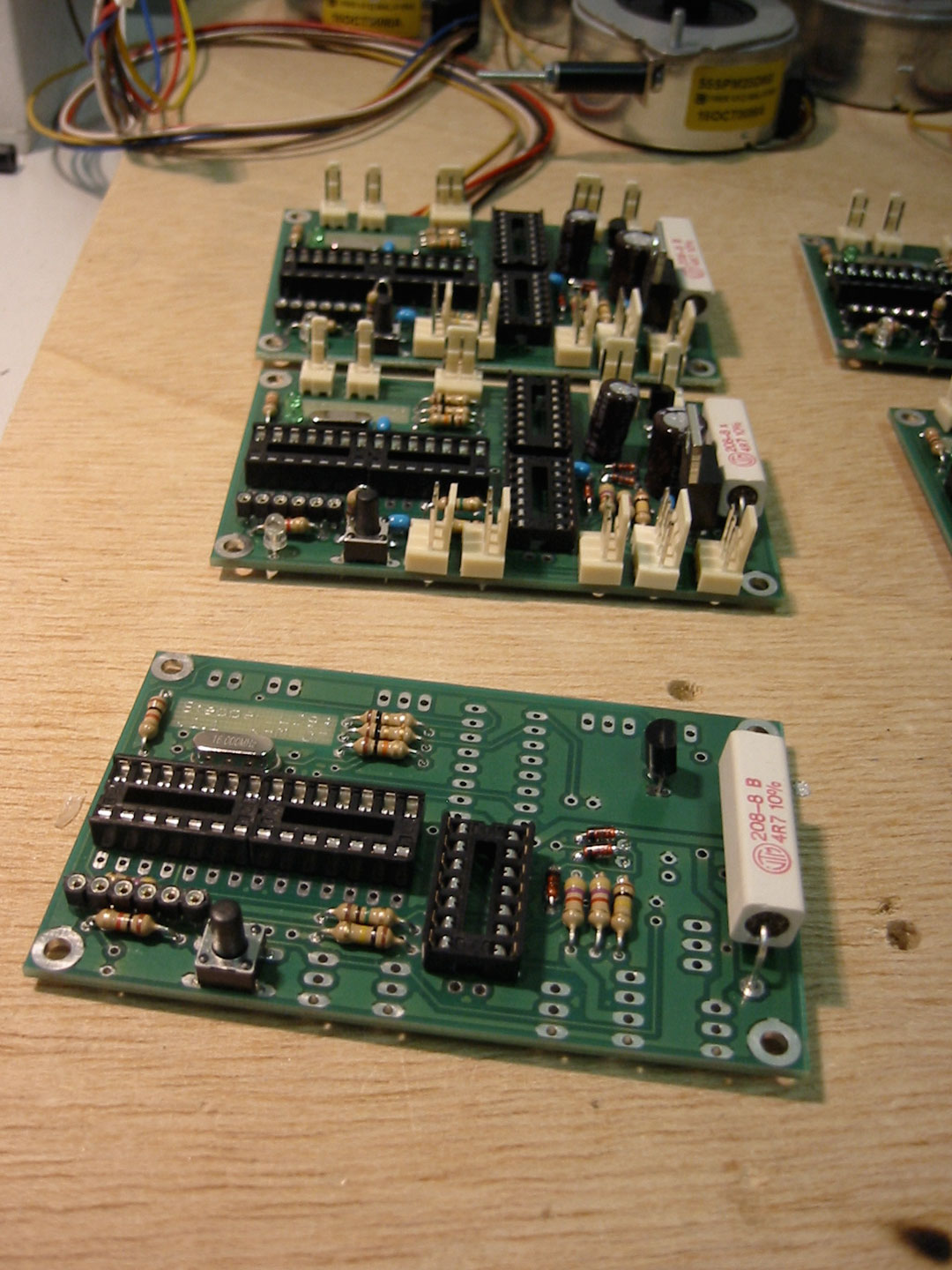
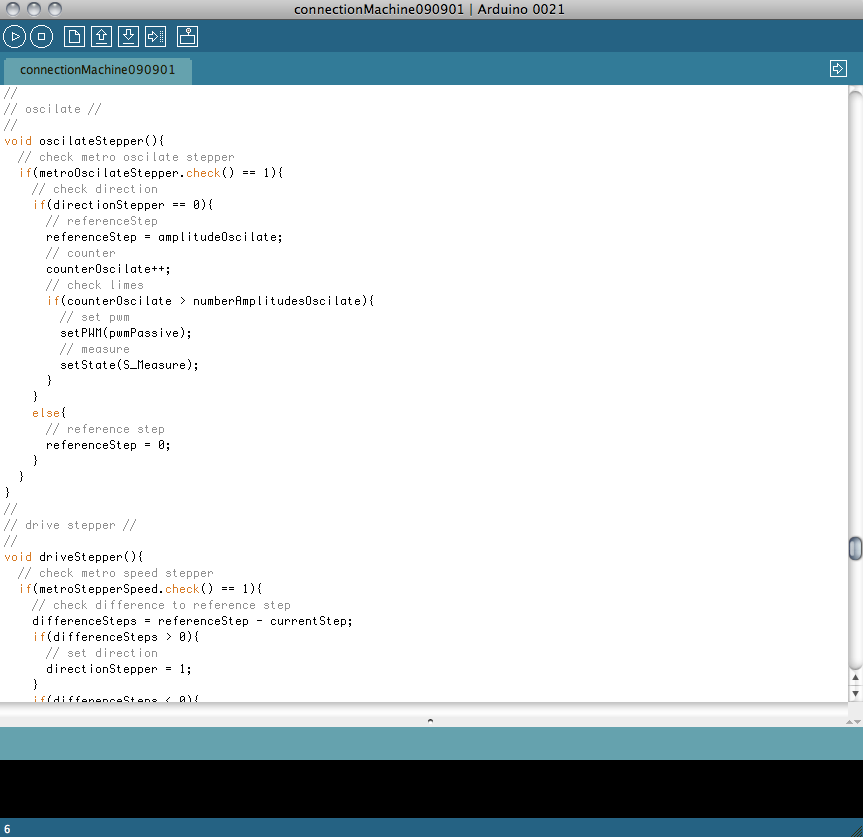
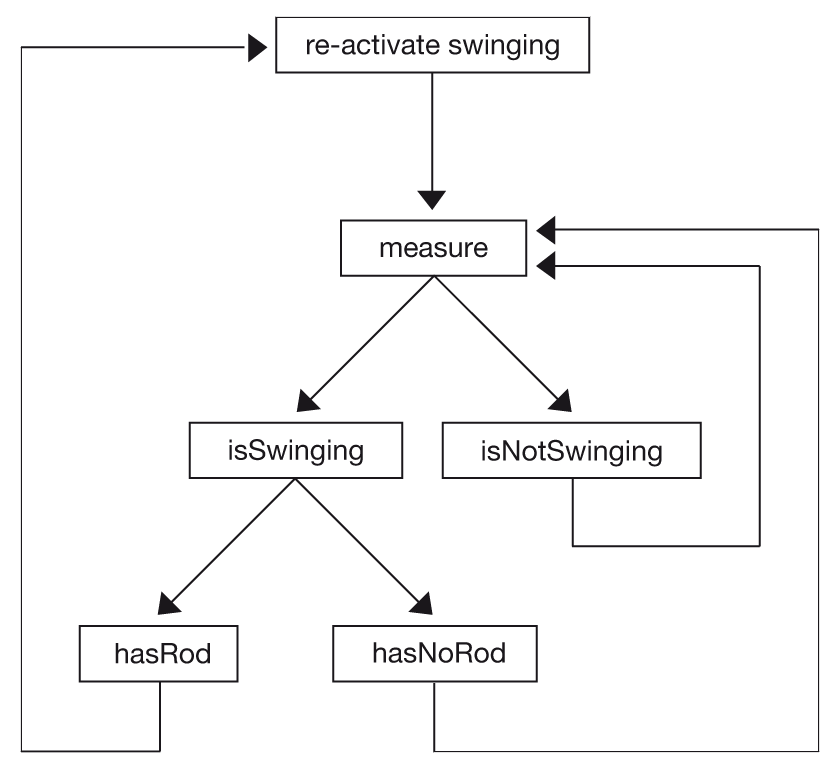
In first experiments a computer simulation, built with Processing was used to emulate the behavior of the later sculpture. Through a simple GUI the user was able to set the main parameters of the software and change the values in realtime. In the final scultpure all microcontrollers are based on the physical computing plattform Arduino and are custom built for this installation. A piezoelectric sensor is used to analyze the swinging behavior of a steel ball. This kind of sensor is just capable of measuring frequency and amplitude of the yo-yo like swinging ball. Therefore movement is always required for the measurement and on each restart of the system every ball gets excited in the beginning. In a next step the software on each microcontroller detects if the carbon rod is connected to a ball or not. This is achieved by having a look on the sum of the amplitude. If a ball is not connected, the carbon rod’s swinging amplitude is higher and more regular. If connected the measured frequency is used to re-activate the swinging of the ball in a perfect manner. The subtitle of the work “feedback-driven sculpture” refers to this mechanism. First of all this logic is just implemented in the code. To have an influence to the analog sculpture an actuator – a mechanical device for moving or controlling a mechanism – has to be attached to the microcontroller. Here a stepper motor is used to re-activate the swinging of the suspended ball.
credits
Martina Höfflin, Prof. Georg Trogemann, Prof. Frans Vogelaar, Christiane König (support theory)
Martin Nawrath (support hardware microcontroller)
Heinz Nink, Bernd Voss, Peter Schuster (technical support)
Martin Hesselmeier (photography)
Oswin Schmidt (video)
Michael Pichler (layout thesis)